Ein Sensor im allgemeinen Sinne ist ein Gerät, das eine physikalische Größe in eine andere umwandelt, die für die Verarbeitung, Übertragung oder spätere Umwandlung geeignet ist. In der Regel ist die erste Größe eine physikalische, nicht direkt messbare Größe (Temperatur, Geschwindigkeit, Weg etc.) und die zweite ein elektrisches oder optisches Signal. Eine Nische im Bereich der Messgeräte besetzen Sensoren, deren Hauptelement ein Induktor ist.
Inhalt
Wie der Induktivitätssensor funktioniert und wie er funktioniert
Induktive Sensoren sind nach dem Funktionsprinzip aktiv, dh sie benötigen einen externen Generator, um zu funktionieren. Es liefert ein Signal mit einer bestimmten Frequenz und Amplitude an den Induktor.
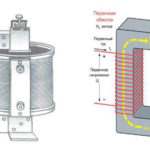
Der Strom, der durch die Windungen der Spule fließt, erzeugt ein Magnetfeld. Tritt ein leitfähiger Gegenstand in das Magnetfeld ein, ändern sich die Parameter der Spule.Es bleibt nur noch, diese Änderung zu beheben.
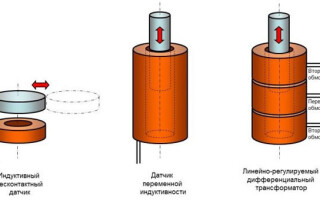
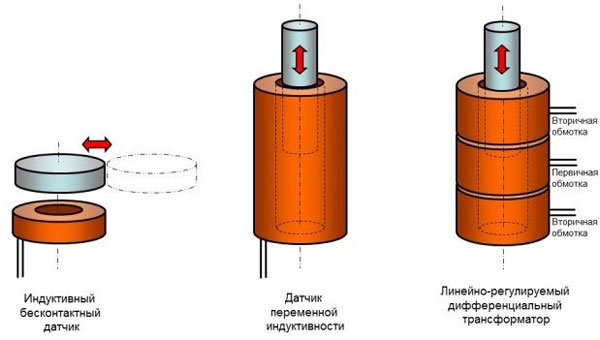
Einfache berührungslose Sensoren reagieren auf das Erscheinen von Metallgegenständen im Nahbereich der Wicklung. Dadurch ändert sich die Impedanz der Spule, diese Änderung muss in ein elektrisches Signal umgewandelt, verstärkt und (oder) der Durchgang der Schwelle mit einer Vergleichsschaltung fixiert werden.
Sensoren eines anderen Typs reagieren auf Änderungen in der Längsposition des Objekts, das als Kern der Spule dient. Wenn sich die Position des Objekts ändert, bewegt es sich in die Spule hinein oder aus ihr heraus, wodurch sich ihre Induktivität ändert. Diese Änderung kann in ein elektrisches Signal umgewandelt und gemessen werden. Eine andere Version eines solchen Sensors ist, wenn sich ein Objekt der Spule von außen nähert. Dies bewirkt, dass die Induktivität aufgrund des Erdeffekts abnimmt.
Eine weitere Variante des induktiven Wegsensors ist ein linear einstellbarer Differentialtransformator (LVDT). Es ist eine zusammengesetzte Spule, die in der folgenden Reihenfolge hergestellt wird:
- Sekundärwicklung 1;
- Primärwicklung;
- Sekundärwicklung 2.
Das Signal vom Generator wird der Primärwicklung zugeführt. Das von der mittleren Spule erzeugte Magnetfeld induziert eine EMF in jeder der Sekundärspulen (Transformator-Prinzip). Der Kern ändert, wenn er sich bewegt, die gegenseitige Verbindung zwischen den Spulen, wodurch die elektromotorische Kraft in jeder der Wicklungen geändert wird. Diese Änderung kann durch die Messschaltung festgelegt werden. Da die Länge des Kerns geringer ist als die Gesamtlänge der Verbundspule, kann die Position des Objekts eindeutig durch das EMK-Verhältnis in den Sekundärwicklungen bestimmt werden.
Nach dem gleichen Prinzip – einer Änderung der induktiven Kopplung zwischen den Wicklungen – wird ein Wendesensor aufgebaut.Es besteht aus zwei Koaxialspulen. Das Signal wird an eine der Wicklungen angelegt, die EMK in der zweiten hängt vom gegenseitigen Drehwinkel ab.
Aus dem Funktionsprinzip ist ersichtlich, dass induktive Sensoren, gleich welcher Bauart, berührungslos arbeiten. Sie arbeiten auf Distanz und benötigen keinen direkten Kontakt mit dem gesteuerten Objekt.
Vor- und Nachteile von induktiven Sensoren
Zu den Vorteilen induktiver Sensoren zählen vor allem:
- Designzuverlässigkeit;
- fehlende Kontaktverbindungen;
- hohe Ausgangsleistung, die den Einfluss von Rauschen reduziert und die Steuerschaltung vereinfacht;
- hohe Empfindlichkeit;
- die Fähigkeit, mit Wechselspannungsquellen mit industrieller Frequenz zu arbeiten.
Der Hauptnachteil von induktiven Sensoren ist ihre Größe, ihr Gewicht und ihre Herstellungskomplexität. Zum Wickeln von Spulen mit den angegebenen Parametern ist eine spezielle Ausrüstung erforderlich. Auch die Notwendigkeit, die Amplitude des Signals vom Hauptoszillator genau aufrechtzuerhalten, wird als Minus betrachtet. Wenn es sich ändert, ändert sich auch der Empfindlichkeitsbereich. Da die Sensoren nur mit Wechselstrom arbeiten, wird die Aufrechterhaltung der Amplitude zu einem gewissen technischen Problem. Direkt (oder über einen Abwärtstransformator) kann der Sensor nicht an ein Haushalts- oder Industrienetz angeschlossen werden - darin können Spannungsschwankungen in Amplitude oder Frequenz im Normalmodus sogar 10% erreichen, was die Messgenauigkeit inakzeptabel macht .
Außerdem kann die Messgenauigkeit beeinflusst werden durch:
- Fremdmagnetfelder (Abschirmung des Sensors ist prinzipbedingt nicht möglich);
- EMF-Aufnehmer von Drittanbietern in Versorgungs- und Messkabeln;
- Herstellungsfehler;
- Sensorcharakteristikfehler;
- Spiel oder Verformungen am Einbauort des Sensors, die die Gesamtleistung nicht beeinträchtigen;
- Abhängigkeit der Genauigkeit von der Temperatur (die Parameter des Wickeldrahts ändern sich, einschließlich seines Widerstands).
Die Unfähigkeit von Induktivitätssensoren, auf das Erscheinen von dielektrischen Objekten in ihrem Magnetfeld zu reagieren, kann sowohl Vor- als auch Nachteilen zugeschrieben werden. Dies schränkt einerseits den Anwendungsbereich ein. Andererseits macht es ihn unempfindlich gegen das Vorhandensein von Schmutz, Fett, Sand usw. auf den überwachten Objekten.
Die Kenntnis der Mängel und möglichen Einschränkungen beim Betrieb induktiver Sensoren ermöglicht eine rationelle Nutzung ihrer Vorteile.
Umfang der induktiven Sensoren
Als Endschalter werden häufig induktive Näherungssensoren eingesetzt. Solche Geräte sind weit verbreitet:
- in Sicherheitssystemen als Sensoren für unbefugtes Öffnen von Fenstern und Türen;
- in telemechanischen Systemen als Sensoren der Endposition von Einheiten und Mechanismen;
- im Alltag in den Schemata zur Anzeige der geschlossenen Position von Türen, Rollläden;
- zum Zählen von Objekten (z. B. auf dem Förderband);
- um die Drehzahl der Zahnräder zu bestimmen (jeder Zahn, der am Sensor vorbeigeht, erzeugt einen Impuls);
- in anderen Situationen.

Winkelmessgeräte können zur Bestimmung der Drehwinkel von Wellen, Zahnrädern und anderen rotierenden Bauteilen sowie Absolutwertgeber eingesetzt werden. Außerdem können solche Vorrichtungen in Werkzeugmaschinen und Robotervorrichtungen zusammen mit linearen Positionssensoren verwendet werden. Wobei Sie die Position der Knoten der Mechanismen genau kennen müssen.
Praktische Beispiele für die Implementierung von induktiven Sensoren
In der Praxis können die Bauformen von induktiven Sensoren auf unterschiedliche Weise realisiert werden. Die einfachste Ausführung und Einbeziehung ist für einen Zweidraht-Einzelsensor, der das Vorhandensein von Metallgegenständen in seiner Empfindlichkeitszone überwacht. Solche Geräte werden oft auf der Basis eines E-förmigen Kerns hergestellt, aber dies ist kein grundlegender Punkt. Eine solche Implementierung ist einfacher herzustellen.
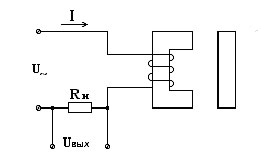
Wenn sich der Spulenwiderstand ändert, ändern sich der Strom im Stromkreis und der Spannungsabfall über der Last. Diese Änderungen können festgeschrieben werden. Das Problem ist, dass der Lastwiderstand kritisch wird. Wenn er zu groß ist, sind die Stromänderungen beim Erscheinen eines Metallobjekts relativ gering. Dies verringert die Empfindlichkeit und Störfestigkeit des Systems. Wenn es klein ist, ist der Strom im Stromkreis groß und ein widerstandsfähigerer Sensor ist erforderlich.
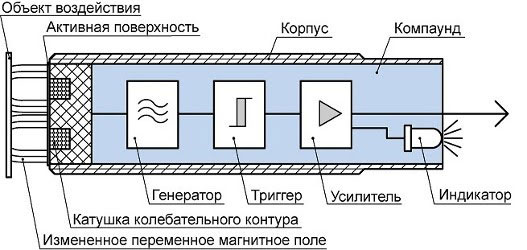
Daher gibt es Ausführungen, bei denen die Messschaltung in das Sensorgehäuse eingebaut ist. Der Generator erzeugt Impulse, die den Induktor speisen. Wenn ein bestimmter Pegel erreicht ist, wird der Trigger ausgelöst und wechselt von Zustand 0 nach 1 oder umgekehrt. Der Pufferverstärker verstärkt das Signal in Bezug auf Leistung und (oder) Spannung, lässt die LED aufleuchten (löscht) und gibt ein diskretes Signal an die externe Schaltung aus.
Das Ausgangssignal kann gebildet werden:
- durch elektromagnetische bzw Halbleiterrelais – null oder ein Spannungspegel;
- „trockener Kontakt“ elektromagnetisches Relais;
- offener Kollektor Transistor (Strukturen n-p-n oder p-n-p).
In diesem Fall werden zum Anschluss des Sensors drei Adern benötigt:
- Lebensmittel;
- gemeinsamer Draht (0 Volt);
- Signalleitung.
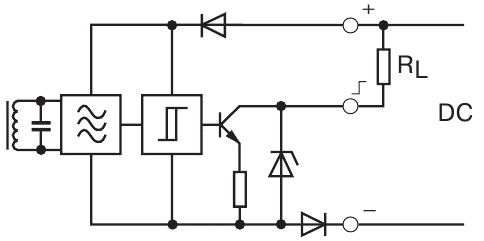
Solche Sensoren können auch mit Gleichspannung versorgt werden. Impulse an die Induktivität Sie werden mittels eines internen Generators gebildet.
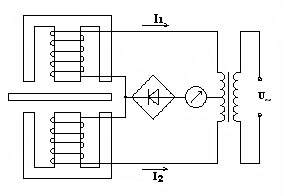
Zur Positionsüberwachung werden differentielle Encoder eingesetzt. Wenn das gesteuerte Objekt in Bezug auf beide Spulen symmetrisch ist, ist der Strom durch sie gleich. Wenn eine Wicklung zum Feld hin verschoben wird, tritt ein Ungleichgewicht auf, der Gesamtstrom ist nicht mehr gleich Null, was durch eine Anzeige mit einem Pfeil in der Mitte der Skala aufgezeichnet werden kann. Der Indikator kann verwendet werden, um sowohl das Ausmaß der Verschiebung als auch ihre Richtung zu bestimmen. Anstelle eines Zeigergeräts können Sie ein Steuerungsschema verwenden, das nach Erhalt von Informationen über eine Positionsänderung ein Signal ausgibt, Maßnahmen zur Ausrichtung des Objekts ergreift, Anpassungen am technologischen Prozess vornimmt usw.

Sensoren, die nach dem Prinzip linear einstellbarer Differentialtransformatoren hergestellt werden, werden in Form von vollständigen Strukturen hergestellt, die aus einem Rahmen mit Primär- und Sekundärwicklungen und einem sich darin bewegenden Stab bestehen (er kann federbelastet sein). Drähte werden herausgeführt, um ein Signal vom Generator zu senden und die EMF von den Sekundärwicklungen zu entfernen. An der Stange kann ein gesteuertes Objekt mechanisch befestigt werden. Es kann auch aus einem Dielektrikum bestehen - für die Messung ist nur die Position des Schaftes von Bedeutung.
Trotz gewisser inhärenter Mängel schließt der induktive Sensor viele Bereiche, die mit der berührungslosen Erfassung von Objekten im Weltraum verbunden sind.Trotz ständiger Weiterentwicklung der Technik wird dieser Gerätetyp den Markt der Messgeräte in absehbarer Zeit nicht verlassen, da seine Funktionsweise auf den Grundgesetzen der Physik basiert.
Ähnliche Artikel: